|
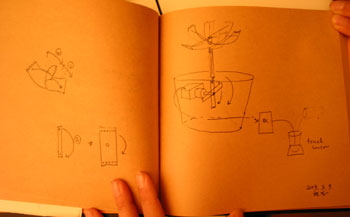
Title : Watering a Flower Materials : a Servomotor, a FSR and fish wire and plastic and boxes and other stuffs to make flower. Ides : The basic idea was that making a flower becomes to be bloomed if I pour water into the cup which is connected to the flower. At first, I had an final project idea that manipulates the video images, using a weight of a cup as an input value, which is depended on how much water your cup is containing. So I would like to test it at this time, for a midterm project, with simple image such as flower blooming images. But after discussing with Jeff, I have changed my mind a little bit and decided to make a phyiscal material as an output. So I have started to thinka about how to make the flower bloom and what materials would be useful for my project for measuring weight and making flower bloomed. And I also thought that if I use the body heat, it could give another sensing value. Process : Thinking about methodology From the pcomp lists server, I asked to people, what would be good to embody this idea. And I got answers that the FSR would be useful to measure the value of weight ( pressure ). And they say the there is heat sensor to measure body heat. I went to the Radio Shack and found heat sensor, but it was so small. So I was not sure about getting an available value if I use it. Todd told me that it might be too sensitive and it would take time to convey and transfer the value from heat. So I decided to postpone materializing the idea incoporating body heat with a pressure. Testing FSR ( 2003.03.07 ) I heard that FSR gives just an on and off and another value from a freind of mine. On the other hand, other people told me that FSR can give continuous values. So I wanted to make sure about that and I also wondered about how big range could I get from the FSR. I tested the FSR in order to examine its value range. Here is my testing note. ------------------------------ when
I use 1k resistor, I get a FSR value range from 0 to 865. a.
just a cup is on the FSR, the value is 0
* the bottom shape of cup is important factor to get a expecting result.
------------------------------ when
I use 10 k resistor, I get a FSR value range from 0 to 1023 a.
just a cup is on the FSR, the value is 0 if
the cup is 0mm far from the FSR upper limit line, the maxmum value is
350(430). *
Because the value is changing continuously, it's difficult to get the
exact value of each case.
making a flower bloomed Another subject to figure out was the question how to make the flower be blooming with motor. I had an idea to make it bloom but I was not sure about the way and materials of it. I thought that the flower material needs to be resilient, because it should return to a original form when it is unfastened. At first, I tested it with an orange juice container box's paper and a straw and thread. And I also considered how to connect and fasten it with motor axis. Fortunately it worked well as I have imagined.
Using servo motor and Coding code : to see my code click here. Last week I tested servo motor and make it run. But I need to study more deeply to exploit it in my project. In order to make servo motor turn, I need principle knowledge about terminology such as 'pulsewidth', 'pulthrange', and so on. At first I tries to understand them and thought about how combine the servo motor and FSR together. It was not easy to understand. The tricky part is using FSR value. It's becuase that when I was using FSR with cup, it only got range from 0 to about 400. At first, I've used the general formula to make the servo motor work which is pulseWidth = minPulse + ((pulseRange * cSng(FSRvalue)) / 1023.0). However the servomotor movement was too sensitive within the specific value and whem it got values within other ranges, it just stayed still. So I changed the dividing number to 450 which was my available working range. pulseWidth = minPulse + ((pulseRange * cSng(FSRvalue)) / 450.0). and I could see smoother servo motor movement as I 've expected. And I also changed the maxium pulse from 0.0022 to0.0025. JungEun told me that servo motor's value ranges from 0.001 to 0.002. Now I am still confusing about the servo motor's value. If the maximum value is 0.002, then how can we use the maxmum value 0.0022? Anyway, after changing the max pulse to 0.0025, I felt that the flower became to bloom more powerfuly compared to before. The rest building parts was not difficult. Because I enjoyed making physical things. While making it, I tested the working of my flower with motor continuously. And I was very excited to see my stuff working. That's the reason why physical computing is most interesting field to me. I hope to incoporate it with video image for the next final poject. Here are the photos of my final results.
|